
 中文
中文 ENGLISH
ENGLISH解决方案
Solutions
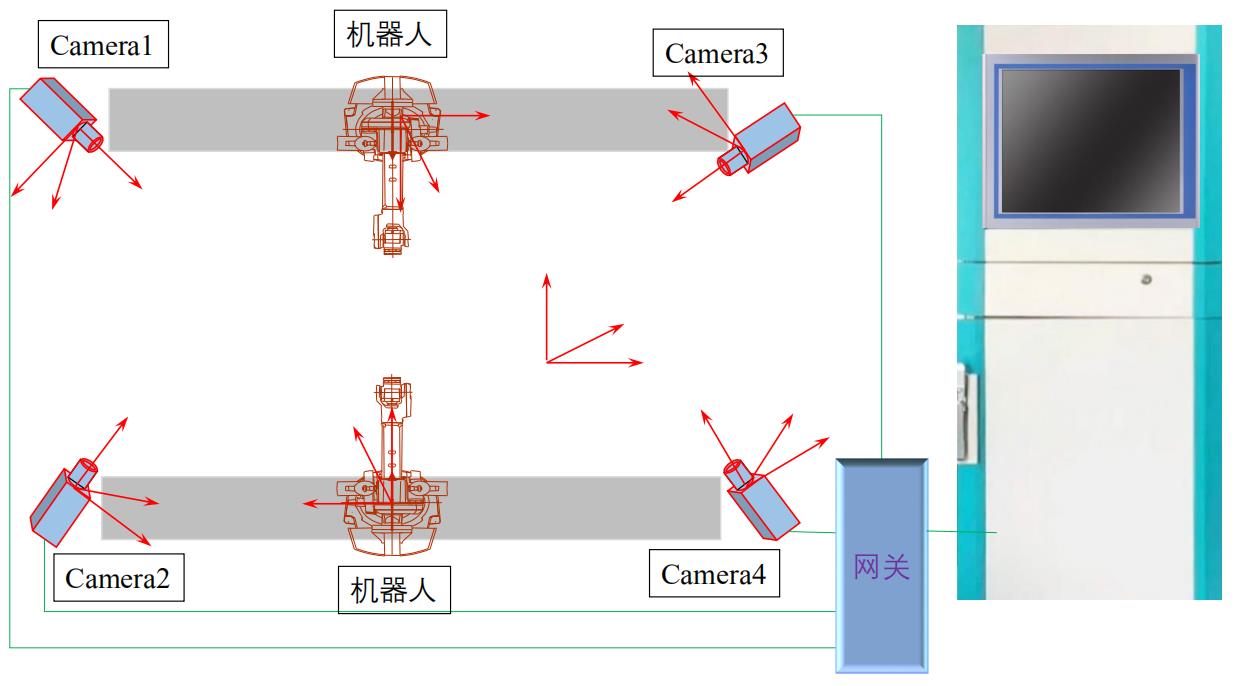
系统架构
3D视觉车身定位系统,由一台电柜、工控机、网关、4+个相机、4+光源组成。



相机位置自检
智能轮廓提取
模板质量评估
示教辅助功能
历史追溯功能
数据统计功能



| 序号/NO. | 设备名/Device name | 规格型号/Specifications |
| 1 | 相机 Camera | - 16mm,25mm,35mm镜头相机 camera with 16mm,25mm,35mm Lens - 频闪光源 Strobe light source |
| 2 | 视觉系统 Vision System | - 3D视觉引导 3D Robot Vision - 示教功能 Teaching - 历史追溯 Historical tracing |
| 3 | 控制器 Controller | - IPC 610 - 处理器i5-6500 CPU i5-6500 - 2个千兆网口 2 Gigabit Ethernet port - 8G内存 8G RAM - 硬盘2T 2T Hard disk - 系统 Win7 64bits |
| 4 | 控制柜 Cabinet | - 尺寸 Size H×W×D:1800×600×600 - 空调 Air conditioning |
